I went through the topics, nothing seemed similar to this question. Several searches also failed … so here goes!
To start with - I have not built a Maslow as yet. I’m still trying to get the Makesmith CNC built … I have no experience and I am not mechanically inclined. But I do work with a bunch of mechanical people and some ideas do rub off  What do I do? I am an electrical engineer, with 25+ years experience in industrial controls. Most of that does not apply to this topic.
What do I do? I am an electrical engineer, with 25+ years experience in industrial controls. Most of that does not apply to this topic.
Reading through the posts, I like the Maslow design and what you all are doing with it. I think the Maslow method of moving the router is very good, quite accurate. And I like that it can be put together almost anywhere.
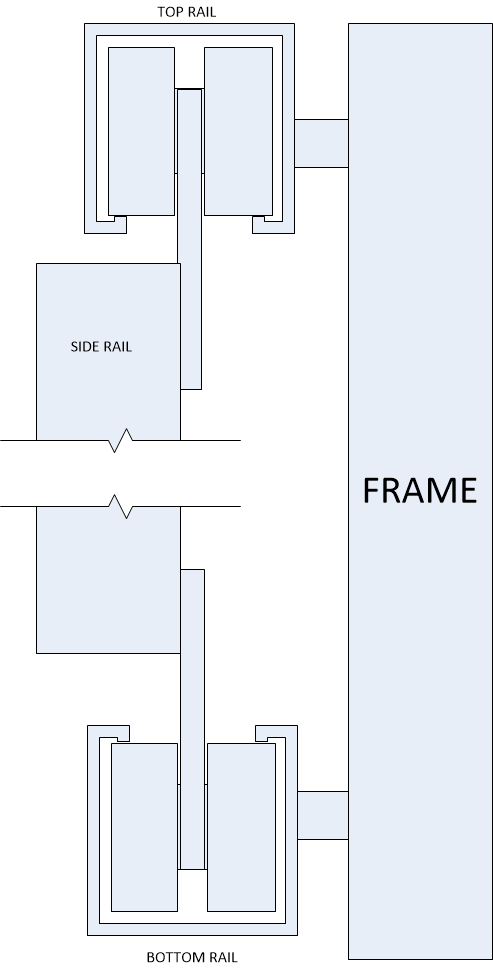
To help with a couple of the sources of error (rotation near edges, wrap on the gear sprockets) I am playing with the idea of using a more traditional-looking CNC frame to support the router. The movement of the router is still controlled by chains from the top corners, and the whole thing is near vertical to keep the chains tight.
The X axis moves on rollers, with the track above and below the work space. The Y axis mounts to a gantry that slides along the X axis and guides the movement of the router to prevent twisting, or rotation. The anchor points on the router base would still be about the same spots, but the router base is connected to the Y gantry so it can’t rotate.
The Z axis would not change.
The bricks would likely not be required since the gantry system is quite heavy to support a decent sized router. The rails would be aluminum square tube, the rollers rubber or plastic with decent bearings. Since the frame would not be used to drive the router movement, the lead screw issues, belts, chains, cables, etc would not apply. it’s still driven by the chains on the corners.
The extra weight of the gantry and the rollers will, of course, reduce the speed of the CNC cuts. It will likely mess up the software to have that much mass in motion, having to decelerate it before moving in a new direction … but I think that is relatively easy to fix compared to the rotation problem.
i don’t think that the gantry needs to deal with the z position since that is already part of the Maslow design. So the gantry can be minimal as long as it is stiff enough to support the router base and router.
If there is an existing topic on this, please move my post. And if not, I’m interested to hear what others see as the pros and cons of this approach.
I’ll start the lists
Pros -
1 - no rotation of the router base, so no location error of the cutting head based on X and Y location relative to drive gear location
2 - no error in the wrap of the drive chain due to rotation of the base
3 - sorry - that’s about all I can come up with for Pros. Is that enough to justify the extra parts, weight, slower movement, etc?
Cons -
1 - much heavier mechanism
2 - higher cost
3 - much more complicated movement of the gantry could bind in some common movement profiles, depending on how the chains clear the gantry and how the chain drive is modified (raised in the Z axis?)