I recieved my brothers maslow and i can not get this properly to running.
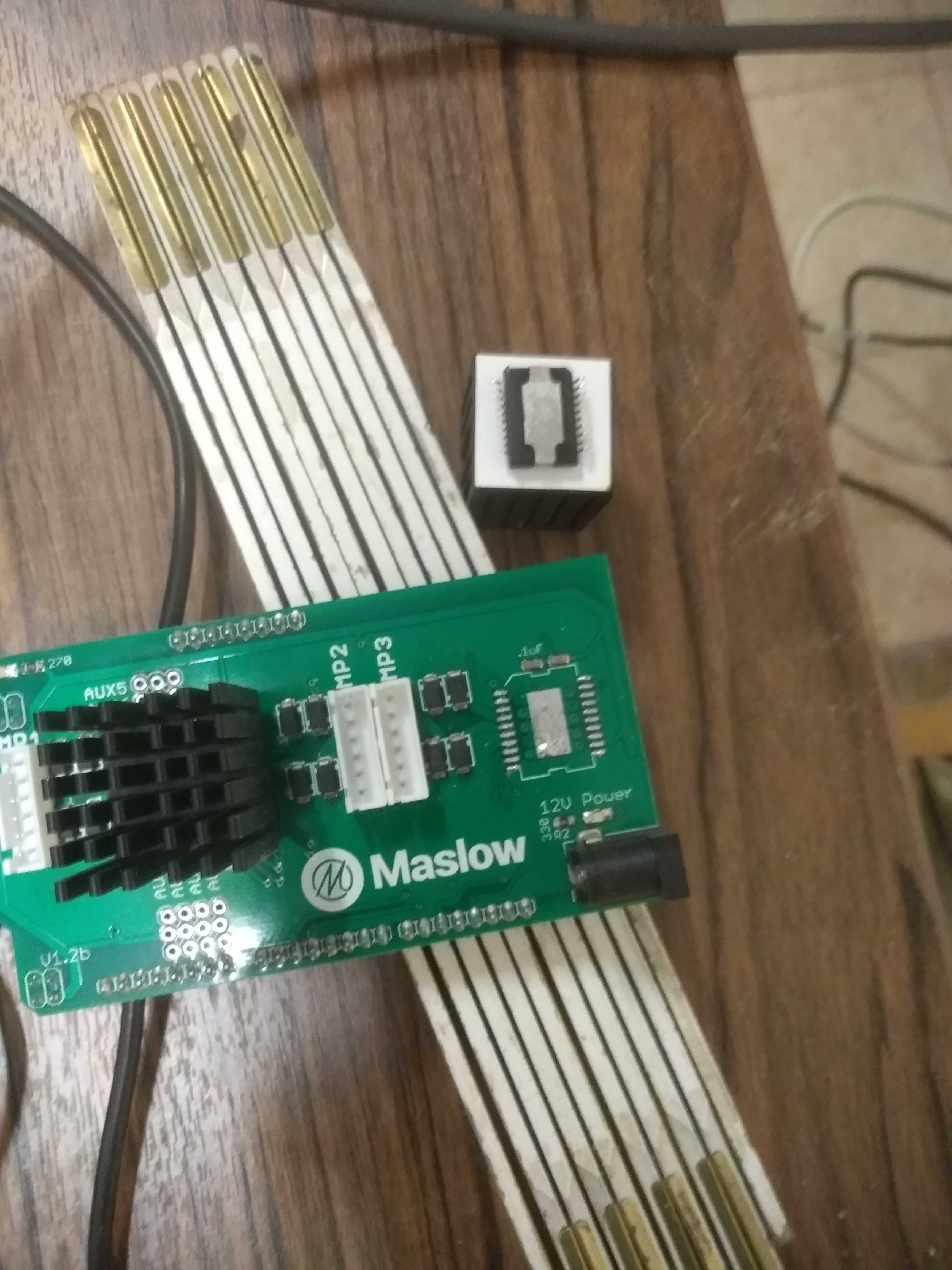
It has board version V1.2B
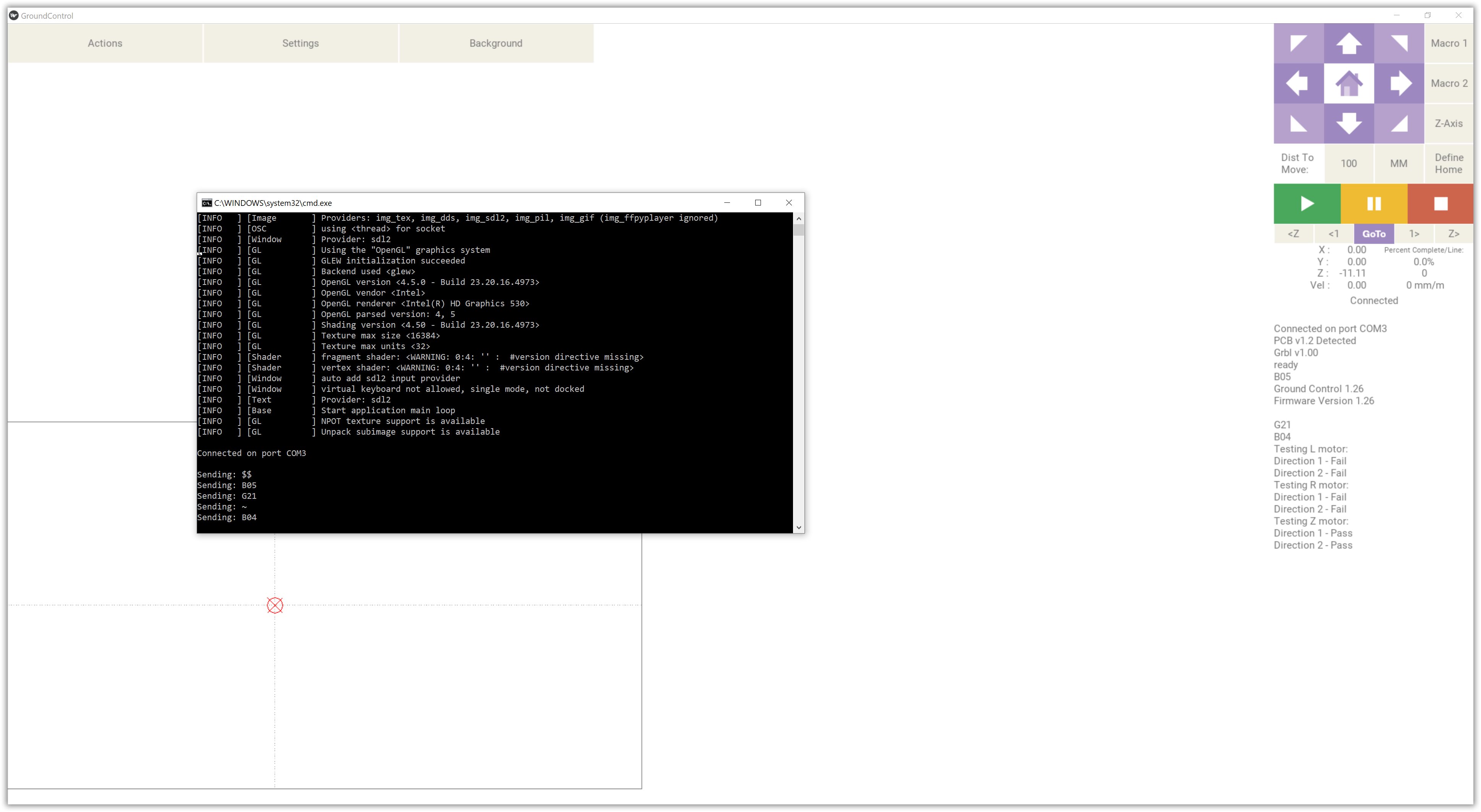
when i boot i get this screen below where it’s telling direction 1 & 2 are failing. But the motors are turning ! in both directions. (for left and right side)
If the motors are rotating in each direction but still failing the test to me that means that the signals from the encoders are not being read correctly.
I can think of two possibilities for why that could be. A loose cable could cause that behavior if the signal is not getting to the controller board, but that seems unlikely for both sides. The other issue would be if the firmware is recognizing the wrong board version. What board version is recognized when you connect? It should be printed over on the right side
If the encoders are not reporting, any move command sent to them will cause the motors to run at full speed for however long it should take the motors to make the requested move. A 5 deg ccw is pretty short, but you certainly should be able to see it if you are watching it when you hit the button.
Is this a ‘stock’ Maslow? stock motors and controller or was something custom made? maybe a few photos would help.
I did some searching around and it looks like finding a replacement is disconcertingly difficult. None of the three groups currently selling kits have them in stock. I dug through my spare parts box and I have one that I can send you if you can direct message me the address you want it sent to. I can get that in the mail on Monday.
As a long term solution it would be really great to have controller boards available. I am working on a redesigned version which I will make a point of making available when I have a working prototype so that they are out there for folks.
Btw this came down when i was extending my chain, for measure the distance between the motors.
Maybe this is added info to prevent for the future.
(I added 1 number for 1 meter length extention)
But if I look at the picture again this is from the right motor, and i was using the left one to extend.
That is FANTASTIC!! Nice work guys! I just mailed @Makerspace-Baasrode some so they should be good for now, but I am really excited that you have them back in stock
 But the motors are turning ! in both directions. (for left and right side)
But the motors are turning ! in both directions. (for left and right side)