Hello.
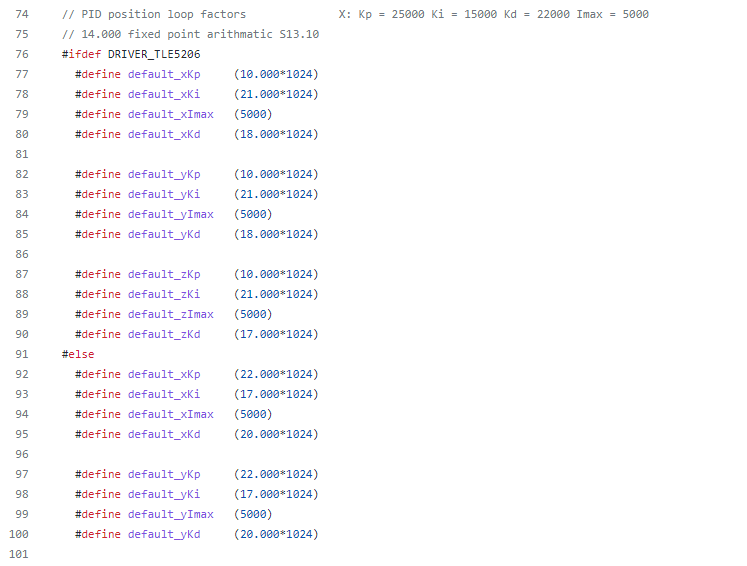
Currently I made conversion of tle5206 shield to work with Arduino due. Makerverse is opening, but since I have custom motors on my machine and those are not spining like they should, I am confused how to set PID. In original maslow there was simply Kp Ki Kd, but here in due code I have some numbers multiplied by 1024 if I remember correctly and those numbers multiplied are not equal pid parameters stated above. Also there is Imax parameter. How it’s done? Maybe there is some kind of magic PID button to resolve my problem? ![]() Also I have question if there is some kind of tool to test motors like in 1st gen test motors and encoders?
Also I have question if there is some kind of tool to test motors like in 1st gen test motors and encoders?
Nowy obraz mapy bitowej (2).bmp (1.2 MB)
{kind=link}
2 Likes