Im am currently building a 3d maslow that uses a lot of 3D printed parts. I got the idea from the maslow mark 2. I was also tossing around the idea of losing the gantry and mounting the router on a telescopic gantry.



the big advantage of the gantry is that nothing rides on the surface you are
cutting. with your design, nothing supports the bottom of the mechanism, so I
don’t see how it’s an advantage over the sled?
I would suggest that you look at the lowrider 2 CNC it has 3d printed parts that
match up with pipes using skate bearings for it’s motion parts (it is also a
large format CNC, but it lists it’s max speed about half of the Maslow’s speed,
which is already slow, and it’s a flat-bed machine, so it takes more space, but
it’s more conventional kinematics make it more accurate than the maslow is right
no)
David Lang
Low rider looks interesting, but what is the point of having a huge work surface 4x8’ if it takes 2 days to cut it all up? The size of the machine has to be balance with it’s speed. I do not think it has been proven more accurate either since no one has done side by side tests.
to the original poster. You have an interesting design. I would recommend starting with a standard kit and then if you need more accuracy tinkering with it.

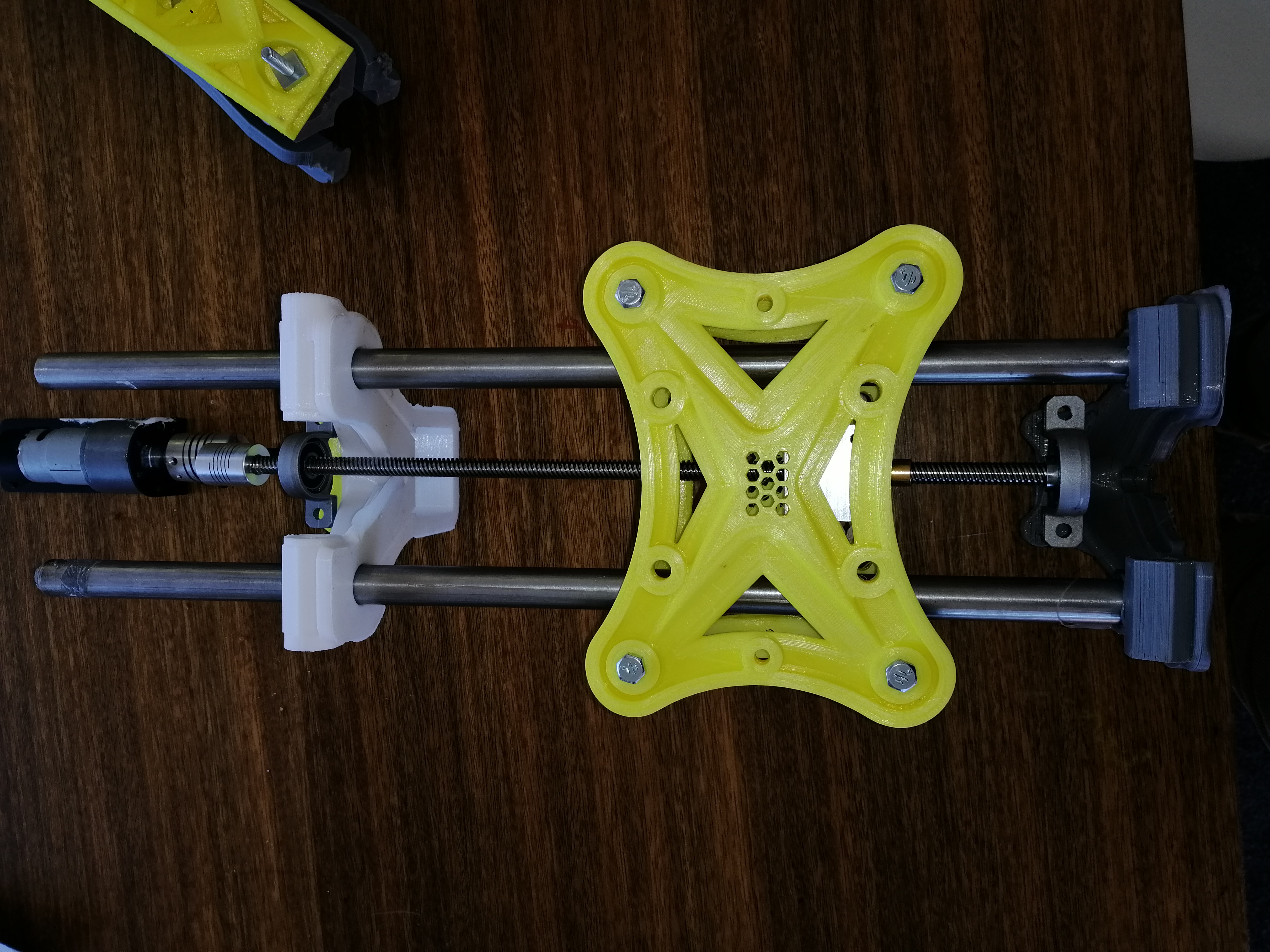
I am going to mount it vertically 90°, so that it doesn’t take up to much space. A lot of the ideas I got came from MPCNC. The pictures show a only the top rail but the is also a bottom rail. The main reason I am building this is so that I can mill 3d profiles. I also plan to mount a plasma cutter that will be operated with a limit switch.
3 Likes
the first picture is not working for me

This is really interesting! Thank you for sharing and I look forward to seeing more.
This looks very promising. It takes the best of the Maslow and the MPCNC/Lowrider ideas and combines them. Will be very interesting to hear what speeds and accuracies result.
Will you be publishing your 3d design files for others to print?
Jeff
The more I look at this the more I like it. Can’t wait to see some video of first cuts and operation!
Are you at a point where you feel you can estimate how far in time you are from your first cut being possible?
Jeff
Another 2 weeks and she will be up and running.
1 Like
Sweet! Keep us posted! Will you be publishing your 3D design files?
And is this an evolution of an existing Maslow you were using or is this a new, from scratch build and your first Maslow? Just curious if you have history to compare to in terms of accuracy and performance.
Is it correct to think you could run at higher speeds with the increased rigidity?
-Jeff
I’m interested in following this. Do you have a name for this project yet? this will make it easier to follow.
Hmmm a name… maybe Maslow On Rails sounds right.
This is not my first Maslow build but it does use the parts from the first build I completed.
I thinks it would cut faster if the firmware was changed, but I that side of things I do not know how to do.
The router would be plenty enough powerful at 1.7kW
the max feed rate in the firmware can be changed, the limiting factor is the max
speed that the stock maslow motors will spin. Unless you have different motors
or gears, you aren’t going to go faster than ~48 ipm (and in practice, you don’t
want to try to go that fast due to the lack of acceleration planning)
David Lang
I like the idea here, allot.
My $0.02
In my figuring the gantry has no way to stay square especially along that length. I’d think if you were anywhere other than the middle and applied a lateral load the two vertical guide rods would go out of square with the horizontal and possibly not even stay parallel to each other.
I think you need a piece that fixes each end of the vertical much like the brackets you have for the router (something rigid with diagonals. In my estimation that’d keep the ends square and let the whole gantry move as a single cohesive unit.
But again this is just my thinking, you’re the one actually doing!