The sketch uses 56,438 bytes (22%) of device memory. Total available 253952 bytes.
Global variables use 2015 bytes (24%) of dynamic memory, leaving 6177 bytes for local variables. Maximum: 8192 bytes.
C: \ Program Files \ arduino-nightly \ hardware \ tools \ avr / bin / avrdude -CC: \ Program Files \ arduino-nightly \ hardware \ tools \ avr / etc / avrdude.conf -v -patmega2560 -cwiring -PCOM1 - b115200 -D -Uflash: w: C: \ Users \ BEND \ AppData \ Local \ Temp \ arduino_build_11274 / cnc_ctrl_v1.ino.hex: i
avrdude: Version 6.3-20171130
Copyright © 2000-2005 Brian Dean, http://www.bdmicro.com/
Copyright © 2007-2014 by Joerg Wunsch
System wide configuration file is "C: \ Program Files \ arduino-nightly \ hardware \ tools \ avr / etc / avrdude.conf"
Using Port: COM1
Using Programmer: wiring
Overriding Baud Rate: 115200
avrdude: stk500v2_ReceiveMessage (): timeout
avrdude: stk500v2_ReceiveMessage (): timeout
avrdude: stk500v2_ReceiveMessage (): timeout
avrdude: stk500v2_ReceiveMessage (): timeout
avrdude: stk500v2_ReceiveMessage (): timeout
avrdude: stk500v2_ReceiveMessage (): timeout
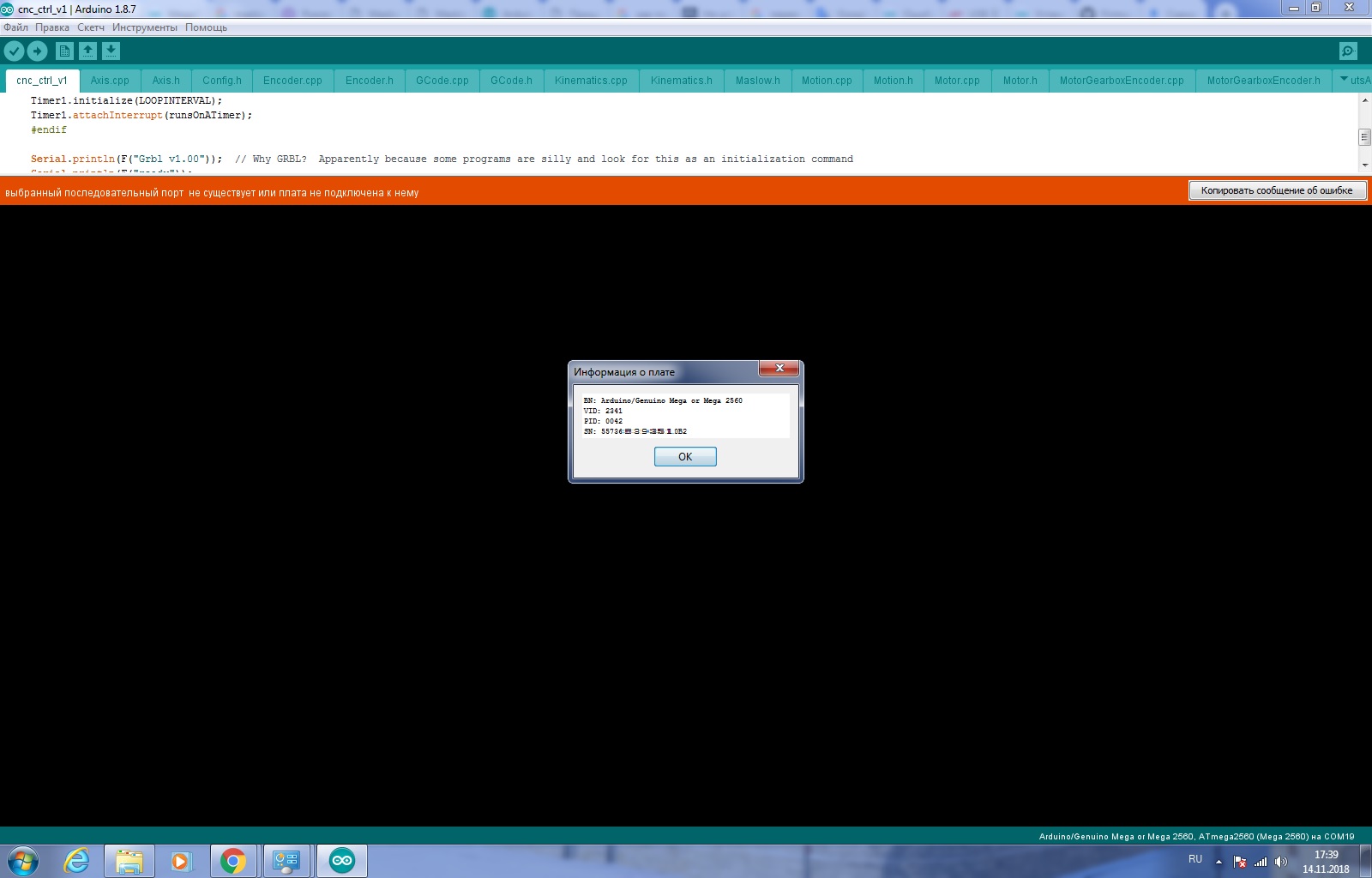
avrdude: stk500v2_getsync (): timeout communicating with programmer
avrdude done. Thank you.
An error occurred while loading the sketch.
/*This file is part of the Maslow Control Software.
The Maslow Control Software is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
Maslow Control Software is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with the Maslow Control Software. If not, see http://www.gnu.org/licenses/.
Copyright 2014-2017 Bar Smith*/
/* To the projects contributers:
*
- it is highly recommended to activate warning output of the arduino gcc compiler.
- Compiler warnings are a great help to keep the codebase clean and can give clues
- to potentally wrong code. Also, if a codebase produces too many warnings it gets
- more likely that possibly important warnings could be overlooked.
- Since the Arduino IDE suppresses any compiler output by default we have to activate it.
- Therefore Arduino IDE users need to activate compiler output in the
- preferences dialog. Additionally Arduino IDE needs to tell the compiler to generate
- warning messages. This is done in the Arduino IDE’s preferences.txt file - you can
- get there via the Preferences Dialog - there is a link to the file at the bottom.
- Edit the line “compiler.warning_level=none” to “compiler.warning_level=all”
- and restart the IDE.
*/
// TLE5206 version
#include “Maslow.h”
// Define system global state structure
system_t sys;
// Define the global settings storage - treat as readonly
settings_t sysSettings;
// Global realtime executor bitflag variable for setting various alarms.
byte systemRtExecAlarm;
// Define axes, it might be tighter to define these within the sys struct
Axis leftAxis;
Axis rightAxis;
Axis zAxis;
// Define kinematics, is it necessary for this to be a class? Is this really
// going to be reused?
Kinematics kinematics;
void setup(){
Serial.begin(57600);
Serial.print(F(“PCB v1.”));
Serial.print(getPCBVersion());
if (TLE5206 == true) { Serial.print(F(" TLE5206 “)); }
Serial.println(F(” Detected"));
sys.inchesToMMConversion = 1;
settingsLoadFromEEprom();
setupAxes();
settingsLoadStepsFromEEprom();
// Set initial desired position of the machine to its current position
leftAxis.write(leftAxis.read());
rightAxis.write(rightAxis.read());
zAxis.write(zAxis.read());
readyCommandString.reserve(INCBUFFERLENGTH); //Allocate memory so that this string doesn’t fragment the heap as it grows and shrinks
gcodeLine.reserve(INCBUFFERLENGTH);
#ifndef SIMAVR // Using the timer will crash simavr, so we disable it.
// Instead, we'll run runsOnATimer periodically in loop().
Timer1.initialize(LOOPINTERVAL);
Timer1.attachInterrupt(runsOnATimer);
#endif
Serial.println(F("Grbl v1.00")); // Why GRBL? Apparently because some programs are silly and look for this as an initialization command
Serial.println(F("ready"));
reportStatusMessage(STATUS_OK);
}
void runsOnATimer(){
#if misloopDebug > 0
if (inMovementLoop && !movementUpdated){
movementFail = true;
}
#endif
movementUpdated = false;
leftAxis.computePID();
rightAxis.computePID();
zAxis.computePID();
}
void loop(){
// This section is called on startup and whenever a stop command is issued
initGCode();
if (sys.stop){ // only called on sys.stop to prevent stopping
initMotion(); // on USB disconnect. Might consider removing
setSpindlePower(false); // this restriction for safety if we are
} // comfortable that USB disconnects are
// not a common occurrence anymore
kinematics.init();
// Let's go!
sys.stop = false; // We should consider an abort option which
// is not reset automatically such as a software
// limit
while (!sys.stop){
gcodeExecuteLoop();
#ifdef SIMAVR // Normally, runsOnATimer() will, well, run on a timer. See also setup().
runsOnATimer();
#endif
execSystemRealtime();
}
}
when downloading, what could be the problem?
on another computer running.
tried another version of aurdino the same outcome