it’s my first time writing here on the forum and I am not quite experienced with Maslow operating so I am here to ask some advice from you guys, the Maslow community.
my brother and i have been slowly making my own DIY Maslow (I thought I missed the chance to buy the kit so I followed Bar’s ‘DIY Kit Mechanical Equivalent Parts’ list very religiously; Motors from the same company, 7ppr, 1:291 gear ratio, 12v)
Right now our Maslow is acting strangely related to calibration, and it would be awesome if I could get some help/advises.
First, I realized determining the length between two motors via calibration wasn’t working. We will get ~2300mm instead of the measured length of 3007mm. Therefore, we manually inputted the length value.
We performed ~20 calibration cuts to satisfy the tolerance limit to pass the calibration. However, even after the calibration, my Maslow is acting strangely.
My Maslow never goes to the center after the calibration or performing any cuts.
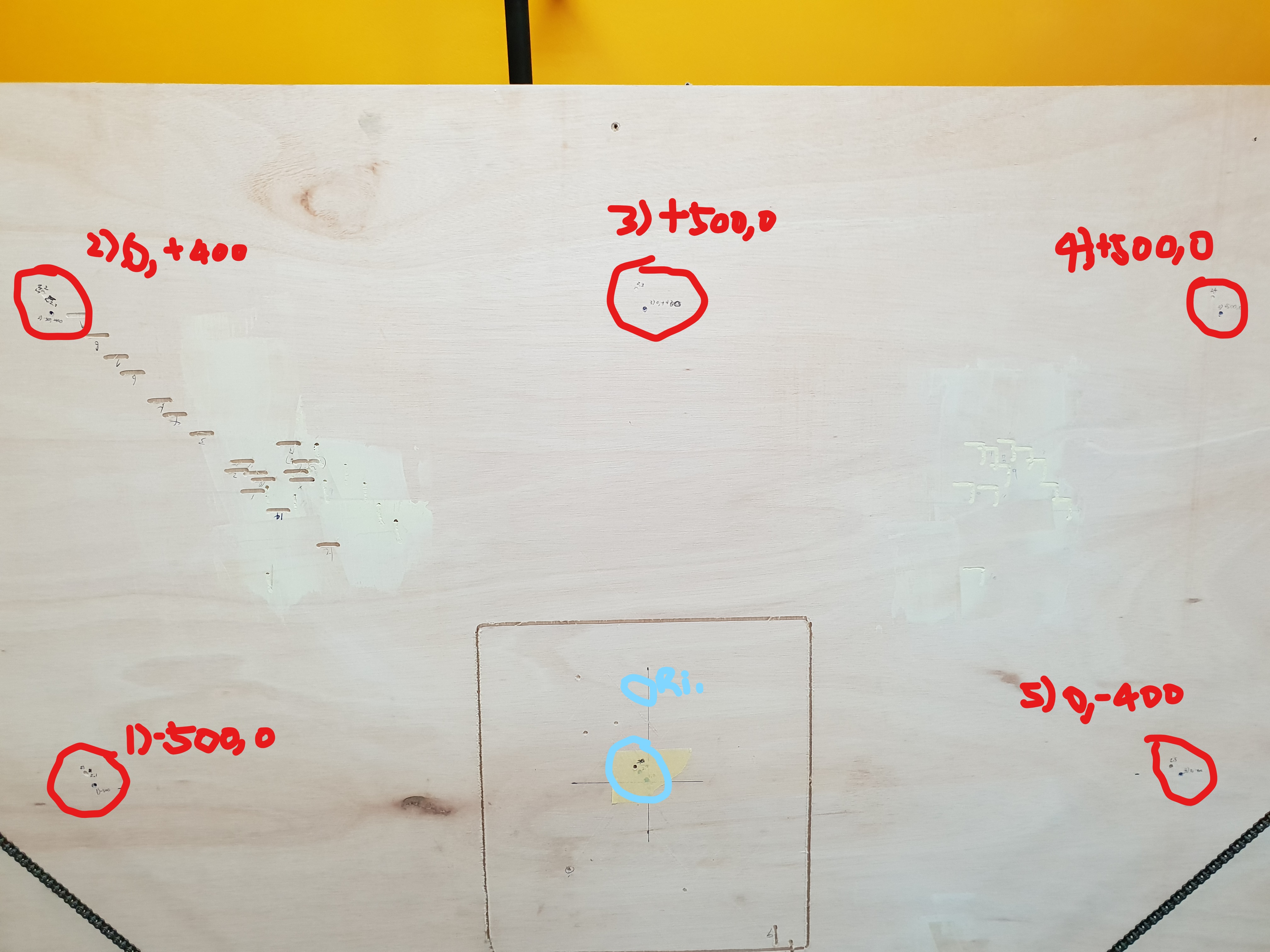
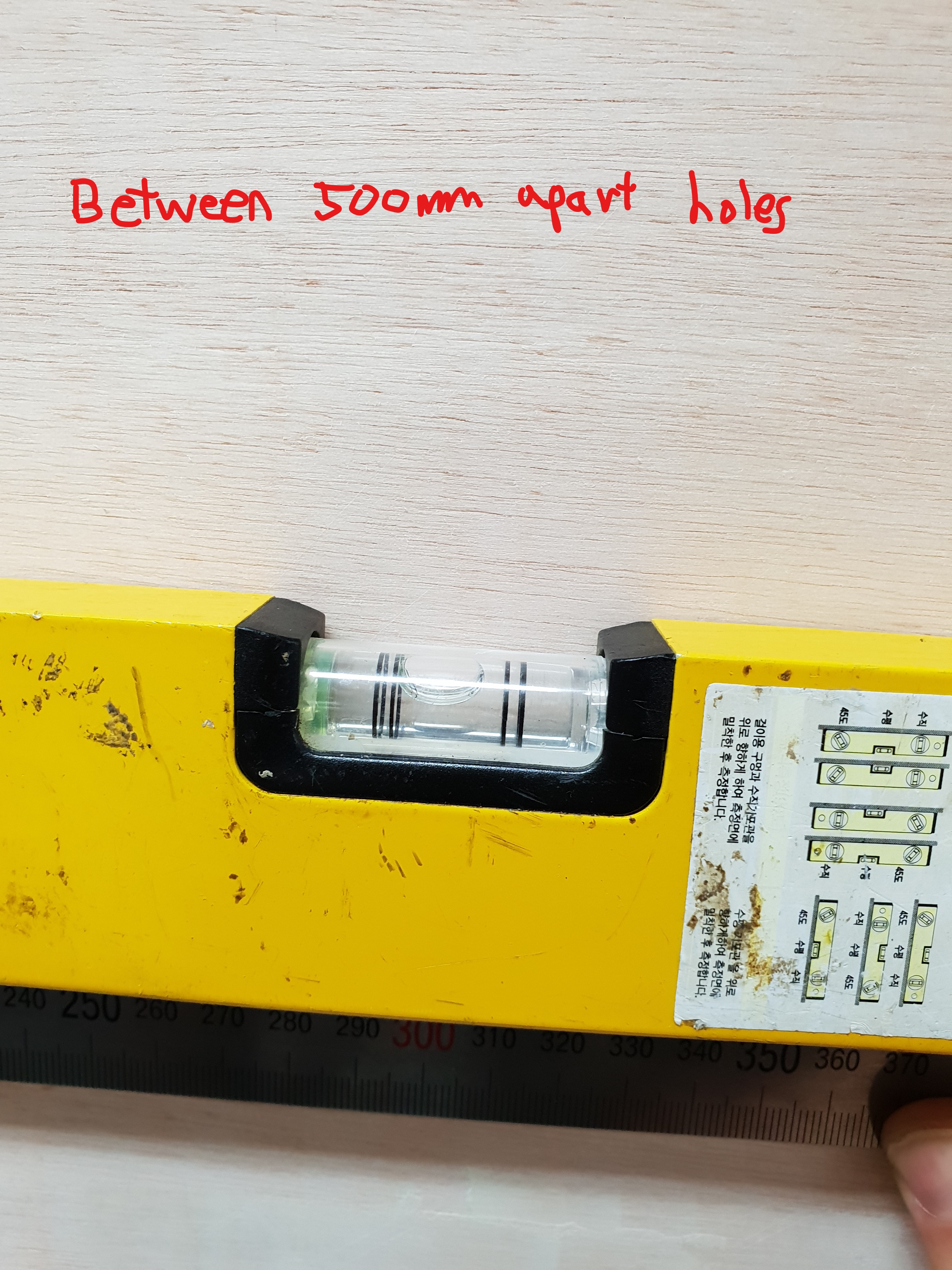
Realized Maslow wasn’t cutting either straight or being consistent. Therefore, we tried to do a performance check. Results are shown below. And, Maslow wasn’t going straight either as shown in the third photo.
being this far off, I would first make sure that you have the correct parameters
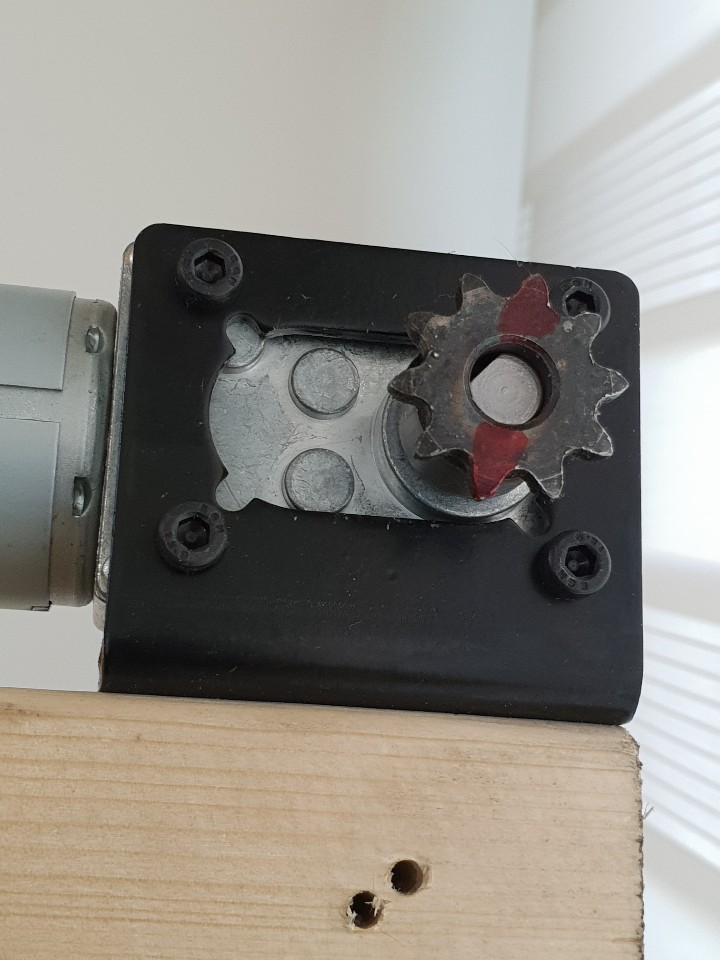
for your motors. If you tell the motors to make 50 turns, do they end up with
the same tooth of the sprocket in the same place? I’d bet tht they don’t
It’s normal for the measured length to be off from the calculated length by
10-20 mm, but being off by 700mm indicates a fundamental problem at this point.
when troubleshooting, it’s a good idea to start with the simplest functionality,
make sure that works, and only then go to more complex things.
Thank you, David, for a quick reply
I have been reading many of your posts and suggestions on the forum and I really appreciate your help
So
my brother and I tested the motor turning; 50 turns on both motors
(“actions” - “calibrate” - “orient each sprockets… ~ …12:00 o’clock” then click '360 deg CW 50 times)
over the weekend, we tested different ‘encoder steps per revolution’ values so at least we can make 50 turns without any errors.
first we tested 8148 for encoder steps per revolution value. After 50 turns, result was worst then default value.
(sprocket teeth was on 3 o’clock after 50 turns)
after few tests, we figured out that 8109 was the best value for turn error. however, calibration result was worst than before. We will do some more test and we will post what we find soon.
thank you and if you have any suggest, it will be a great help
Thank you, David, for a quick reply
I have been reading many of your posts and suggestions on the forum and I really appreciate your help
So
my brother and I tested the motor turning; 50 turns on both motors
(“actions” - “calibrate” - “orient each sprockets… ~ …12:00 o’clock” then click '360 deg CW 50 times)
as you predicted after 50 turns it doesn’t orient the same degree as it was before.
(I also tried 100 turns and it makes the problem worst).
so this means that the steps per revolution that the maslow has configured
doesn’t match your motors, increase or decrease them until you end up exactly
the same place no matter how many times you rotate.
The funny part is when I click “automatic” it will go back to the original position.
automatic corrects for the number of encoder steps, so it will.