I guess zip attachments are not allowed… so here is a snippet of the log :
+++++
2021-11-20 17:00:13
+++++
15218.32: PCB v1.30 Detected
15218.33: Grbl v1.00
15218.35: ready
15218.36: ok
15218.36: Sent: G90
15218.37: [Forward Calculating Position]
15218.54: <Idle,MPos:0.00,0.00,0.40,WPos:0.000,0.000,0.000>
15218.55: [PE:0.00,0.00,120]
15218.74: <Idle,MPos:0.00,0.00,0.40,WPos:0.000,0.000,0.000>
15218.75: [PE:0.00,0.00,120]
15218.79: Message: Unable to find valid machine position for chain lengths -10.06, -1.40 . Please set the chains to a known length (Actions -> Set Chain Lengths)
15218.80: G90
15218.82: ok
15218.82: Sent: G00 Z0.197
15218.83: G00 Z0.197
15218.85: Message: Please adjust Z-Axis to a depth of +0.20 mm
15218.86: Maslow Paused
15218.94: <Pause,MPos:0.00,0.00,0.40,WPos:0.000,0.000,0.000>
15218.95: [PE:0.00,0.00,127]
15219.15: <Pause,MPos:0.00,0.00,0.40,WPos:0.000,0.000,0.000>
...
...
...
...
62742.60: [PE:0.02,0.00,127]
62742.66: Sent: !
62742.67: ok
62742.69: Turning Spindle Off
62742.71: [Forward Calculating Position]
62742.79: <Stop,MPos:0.00,0.00,0.00,WPos:0.000,0.000,0.000>
62742.81: [PE:0.00,0.00,127]
62742.99: <Stop,MPos:0.00,0.00,0.00,WPos:0.000,0.000,0.000>
62743.01: [PE:0.00,0.00,127]
62743.14: Message: Unable to find valid machine position for chain lengths -10.06, -1.40 . Please set the chains to a known length (Actions -> Set Chain Lengths)
62743.20: <Idle,MPos:0.00,0.00,0.00,WPos:0.000,0.000,0.000>
62743.22: [PE:0.00,0.00,127]
62743.40: <Idle,MPos:0.00,0.00,0.00,WPos:0.000,0.000,0.000>
62743.41: [PE:0.00,0.00,127]
62743.60: <Idle,MPos:0.00,0.00,0.00,WPos:0.000,0.000,0.000>
The motors did not move at all.
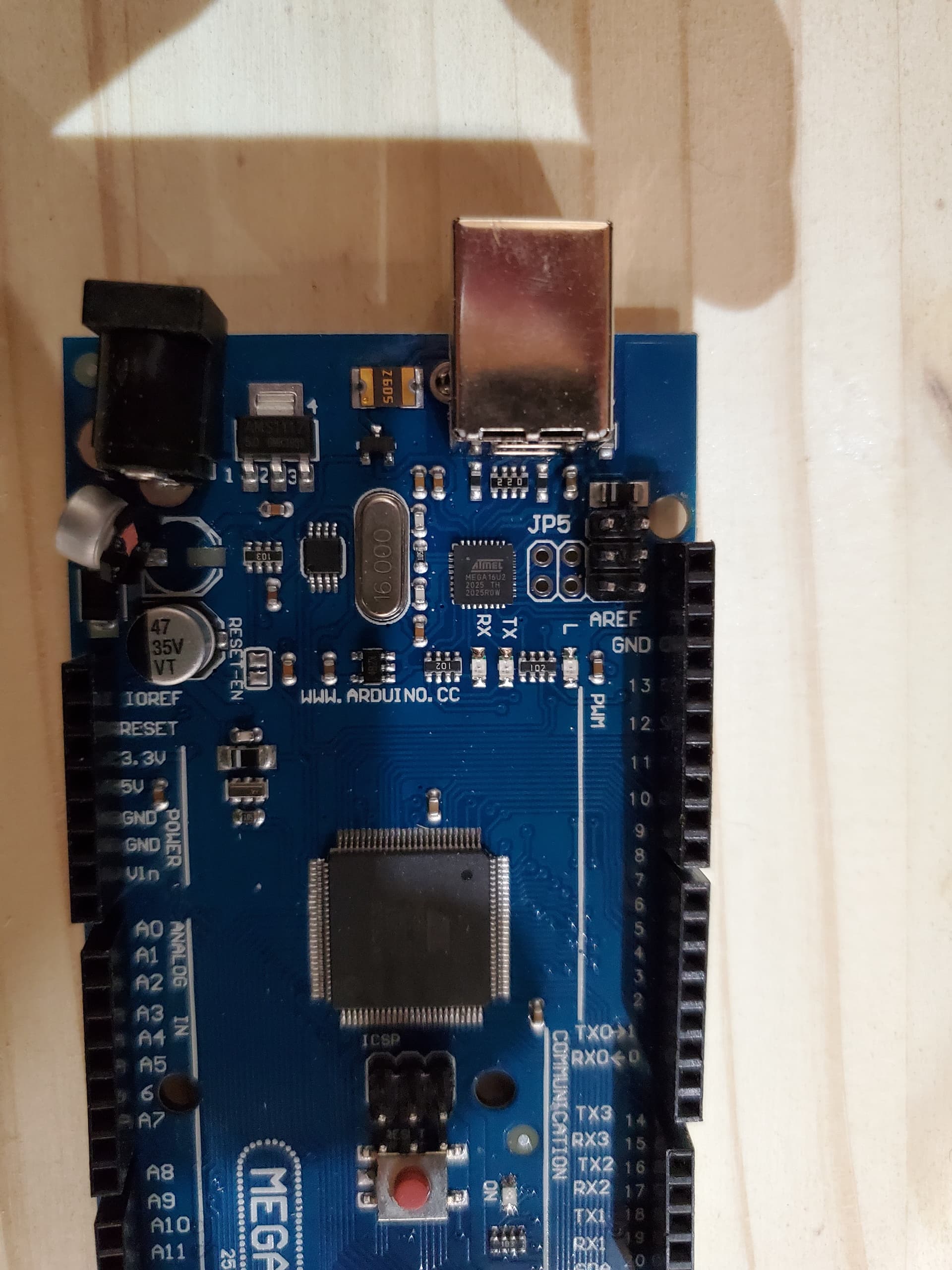
anyways, with the board damaged, I am not sure these logs make sense.